
 All real solutions that
can be isolated from their neighbors by the subdivision tolerance
(i.e. the distance between the two real solution is larger than that
tolerance) are guaranteed to be detected and extracted.
Singularities (higher
order zero contacts) are not handled but the location of the singularity
can be isolated to within the subdivision tolerance.
Solution space can be
zero dimensional (n equations in n variables) in which case a list of
solution points in R^n will be returned.
Solution space can be
one dimensional (n equations in n+1 variables) in which case a list of
solution polylines in R^(n+1) will be returned.
All variables must be of
the form x1 to x18.
All real solutions that
can be isolated from their neighbors by the subdivision tolerance
(i.e. the distance between the two real solution is larger than that
tolerance) are guaranteed to be detected and extracted.
Singularities (higher
order zero contacts) are not handled but the location of the singularity
can be isolated to within the subdivision tolerance.
Solution space can be
zero dimensional (n equations in n variables) in which case a list of
solution points in R^n will be returned.
Solution space can be
one dimensional (n equations in n+1 variables) in which case a list of
solution polylines in R^(n+1) will be returned.
All variables must be of
the form x1 to x18.
 In all examples the domain is
[0,1]^n unless otherwise stated. Rough time estimates are for a
modern Windows workstations as of 2014.
(Univariate) Solution of two equations in (x1, x2, x3) - intersection
of a plane and a Paraboloid (a fraction of a second to solve):
In all examples the domain is
[0,1]^n unless otherwise stated. Rough time estimates are for a
modern Windows workstations as of 2014.
(Univariate) Solution of two equations in (x1, x2, x3) - intersection
of a plane and a Paraboloid (a fraction of a second to solve):  (Univariate) Solution
of two equations in (x1, x2, x3), and domain [-0.5, 1.5] x [0, 1] x
[-1.5, 1] - intersection of a general quartic by cubic surface with a
paraboloid (a few seconds to solve):
(Univariate) Solution
of two equations in (x1, x2, x3), and domain [-0.5, 1.5] x [0, 1] x
[-1.5, 1] - intersection of a general quartic by cubic surface with a
paraboloid (a few seconds to solve): 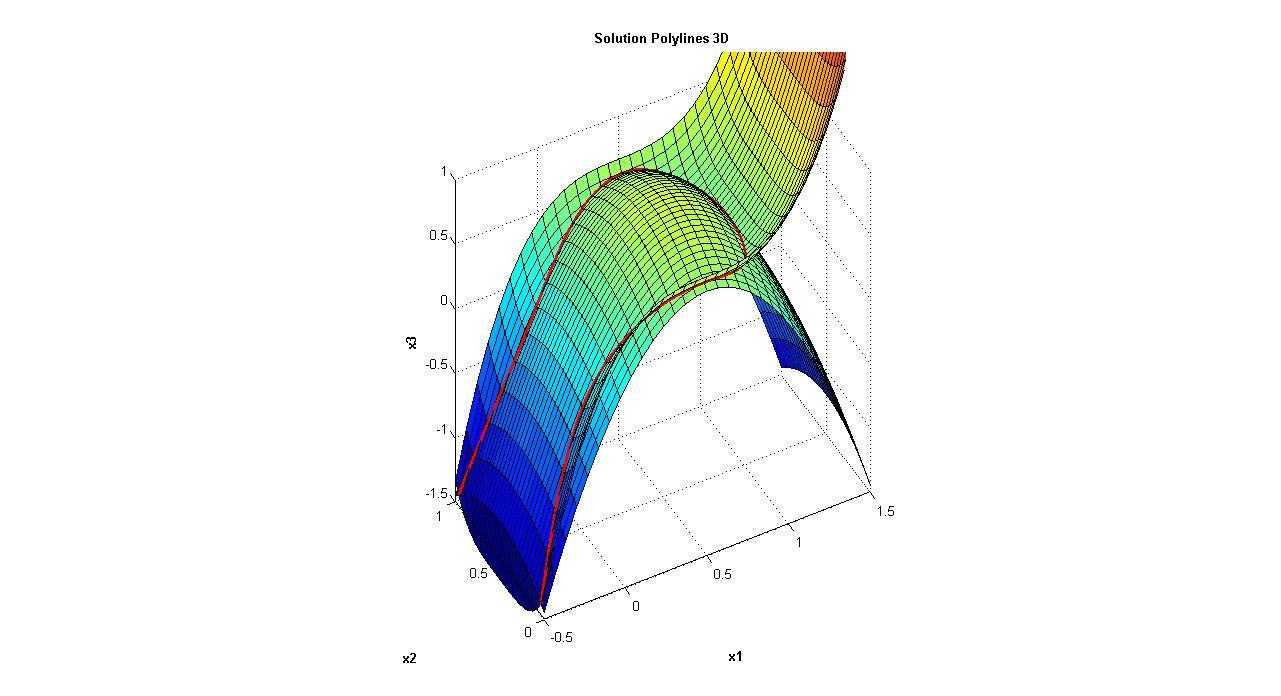 (Zero dimensional) Solution of two equations in (x1, x2) - intersection
of two cubic curves (a fraction of a second to solve):
(Zero dimensional) Solution of two equations in (x1, x2) - intersection
of two cubic curves (a fraction of a second to solve): 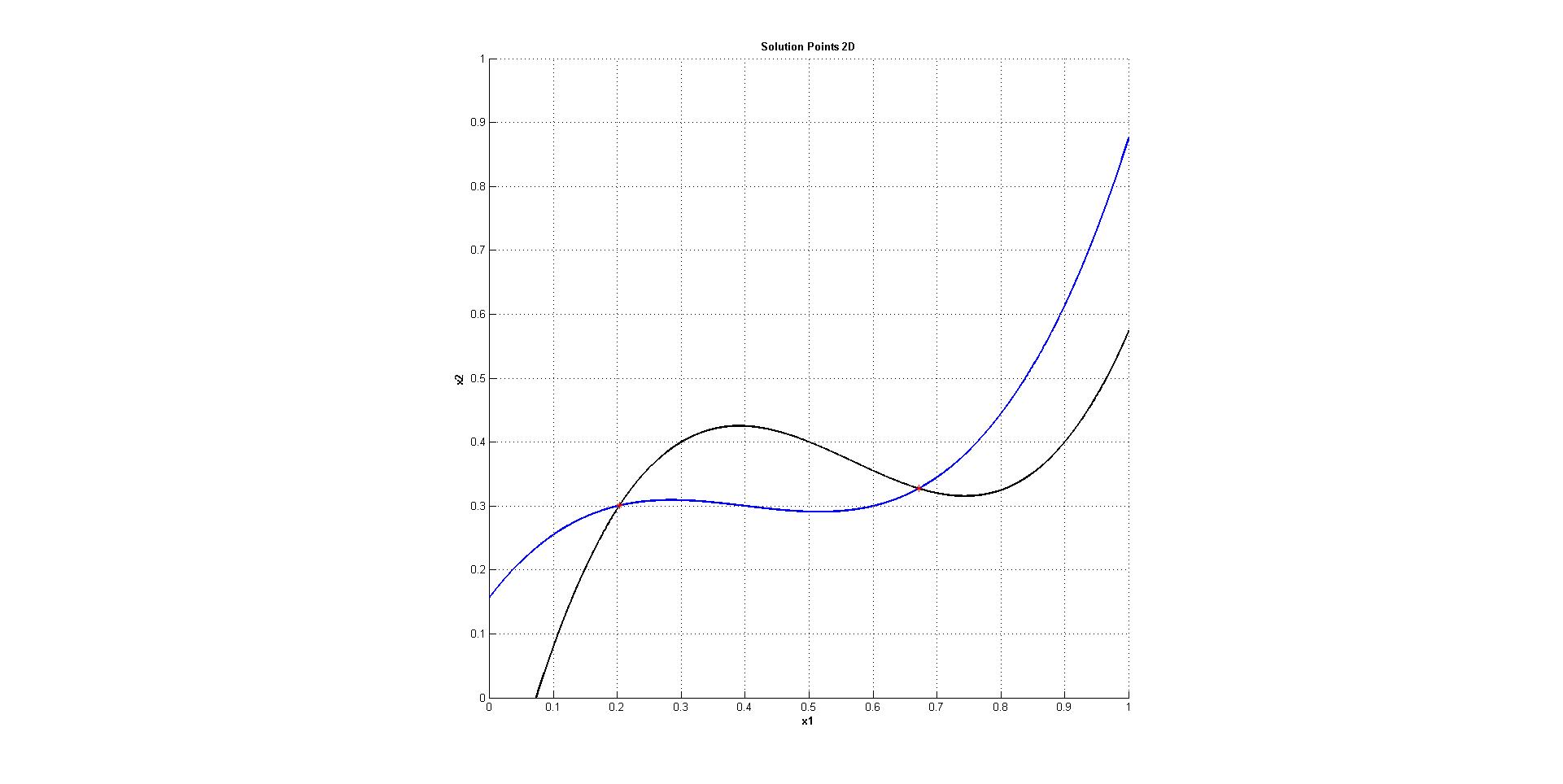 (Zero dimensional) Solution of intersecting three ellisoids in (x1, x2, x3)
(a fraction of a second to solve):
(Zero dimensional) Solution of intersecting three ellisoids in (x1, x2, x3)
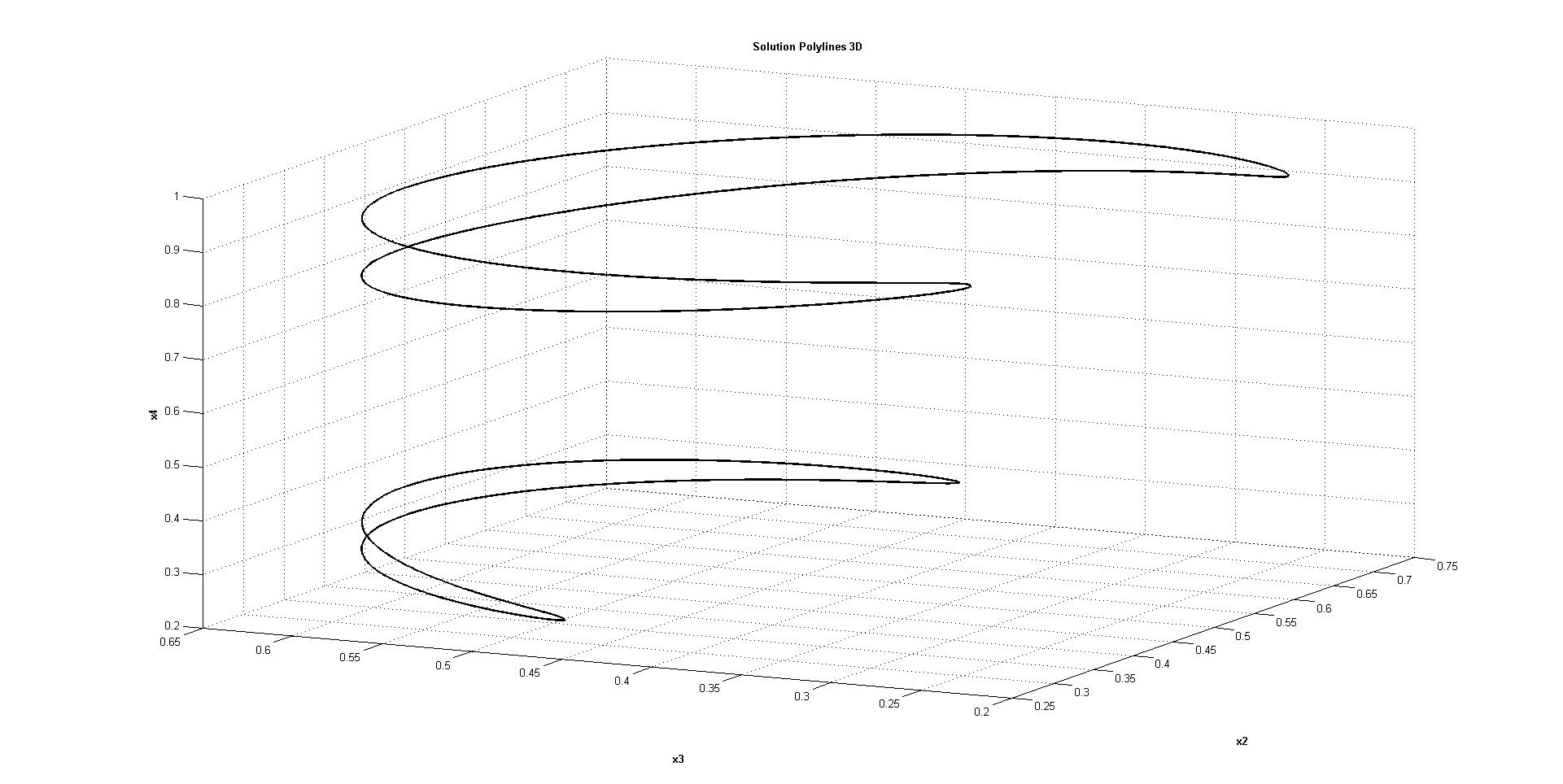
(a fraction of a second to solve): 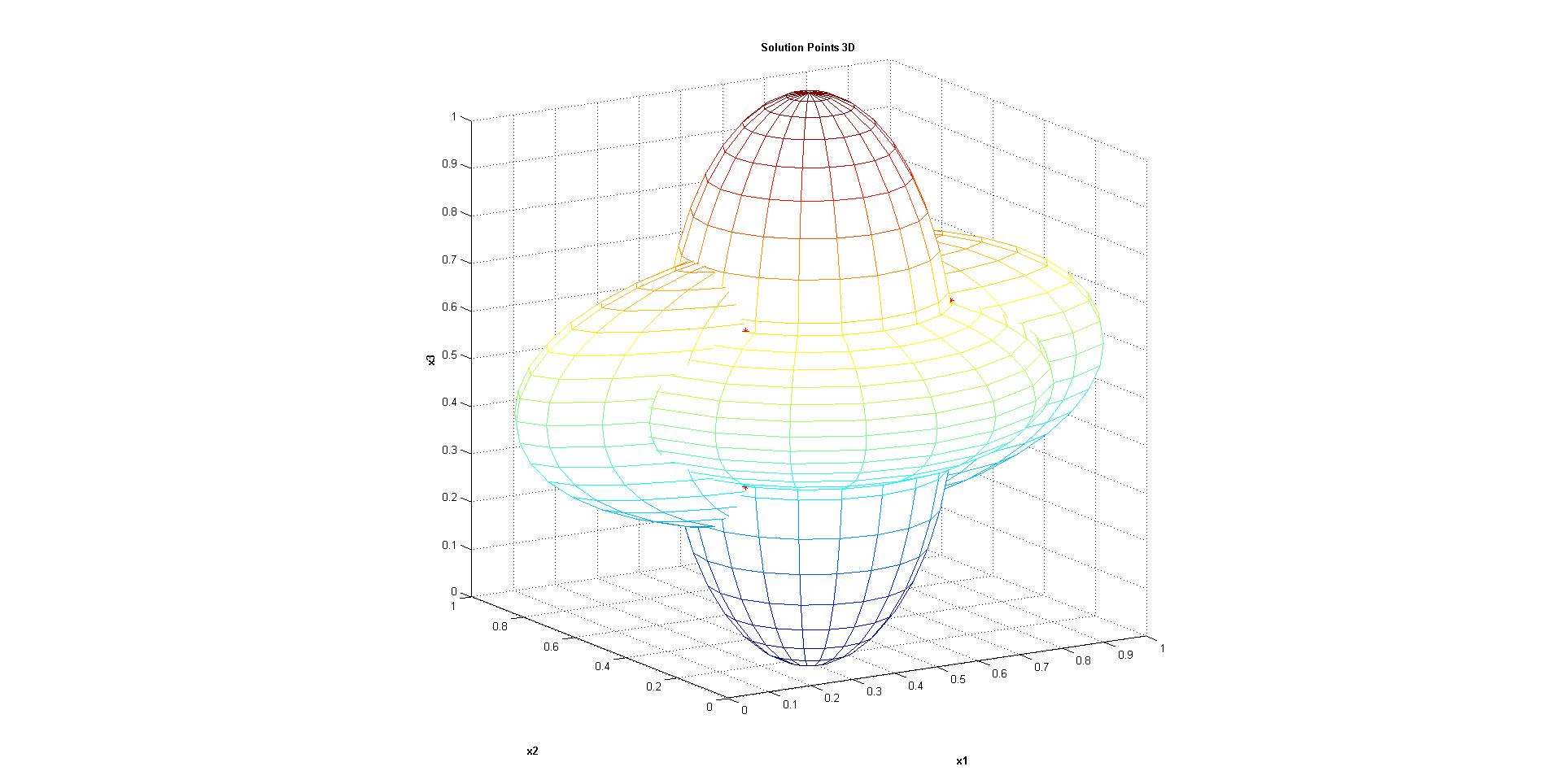 (Univariate) Solution of intersecting three surfaces. The first is the
Ding-Dong surface and the other two are quadratic hyper-surfaces in
(x1, x2, x3, x4) (a few seconds to solve):
(Univariate) Solution of intersecting three surfaces. The first is the
Ding-Dong surface and the other two are quadratic hyper-surfaces in
(x1, x2, x3, x4) (a few seconds to solve): 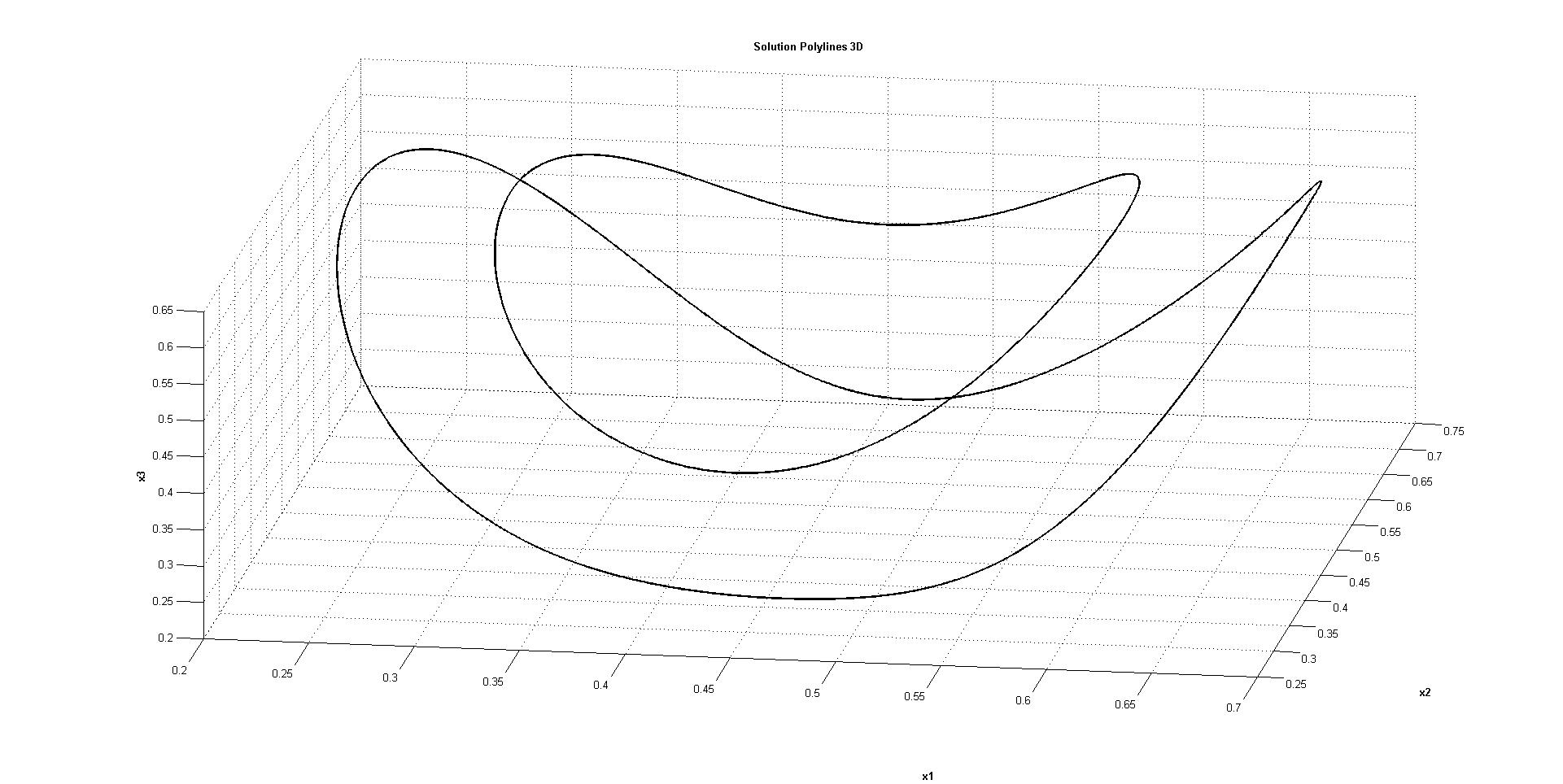
 Download this zip file. This zip contains
matlab code at the source level and the IRIT modeling kernel,
written in C and compiled (on VS2008) as a single DLL, for both 32
bits and 64 bits. See more on IRIT below, including all source code.
Download this zip file. This zip contains
matlab code at the source level and the IRIT modeling kernel,
written in C and compiled (on VS2008) as a single DLL, for both 32
bits and 64 bits. See more on IRIT below, including all source code.
 IritPolynomialSolver.m - Matlab interface to the polynomial equations' solver.
IritPolynomialSolver.m - Matlab interface to the polynomial equations' solver. |
|
IritPlotSolution.m - Matlab file to plot the solution generated by the solver. |
|
irit*dll - the necessary Irit compiled dll files for
running the mex, for both 32 bits and 64 bits. |
| IritPolynomialSolverMex.mexw32
and IritPolynomialSolverMex.mexw64 - The compiled Mex engine for the
polynomial solver, for 32bit or 64 bit architecture, respectively
The mex files were built using Matlab versions 2011b (for 64bit) and
2012a (for 32bit), and also tested on 2013 versions. |
|
IritPolynomialSolverTest.m - Test program of the solver. |
|
readme.txt - Simple help, similar to this. |
Unpack the
IritPolynomialSolver.zip file at a new directory of your selection,
called "main directory" hereafter.
In MATLAB (under the
"Current Folder" section), right click on the IritPolynomialSolver
main directory and select "Add to Path -> Selected Folders and
Subfolders". This will enable you to use the Irit solver, regardless
of the location of the Current Folder. For this to hold in future
Matlab sessions, select "Set path" from the Matlab menu (depending on
your Matlab version) and "Save".
BECAUSE IRIT AND ITS SUPPORTING INTERFACE TOOLS AS DOCUMENTED IN
THIS DOCUMENT ARE LICENSED FREE OF CHARGE FOR NON COMMERCIAL USE, I
PROVIDE ABSOLUTELY NO WARRANTY, TO THE EXTENT PERMITTED BY
APPLICABLE STATE LAW. EXCEPT WHEN OTHERWISE STATED IN WRITING, I GERSHON ELBER
PROVIDE THE IRIT PROGRAM AND ITS SUPPORTING TOOLS "AS IS" WITHOUT
WARRANTY OF ANY KIND, EITHER EXPRESSED OR IMPLIED, INCLUDING, BUT
NOT LIMITED TO, THE IMPLIED WARRANTIES OF MERCHANTABILITY AND
FITNESS FOR A PARTICULAR PURPOSE.
THE ENTIRE RISK AS TO THE
QUALITY AND PERFORMANCE OF THESE PROGRAMS IS WITH YOU. SHOULD THE
IRIT PROGRAMS PROVE DEFECTIVE, YOU ASSUME THE COST OF ALL NECESSARY
SERVICING, REPAIR OR CORRECTION.
IN NO EVENT UNLESS REQUIRED BY APPLICABLE LAW WILL GERSHON ELBER, BE
LIABLE TO YOU FOR DAMAGES, INCLUDING ANY LOST PROFITS, LOST MONIES,
OR OTHER SPECIAL, INCIDENTAL OR CONSEQUENTIAL DAMAGES ARISING OUT OF
THE USE OR INABILITY TO USE (INCLUDING BUT NOT LIMITED TO LOSS OF
DATA OR A FAILURE OF THE PROGRAMS TO OPERATE WITH PROGRAMS NOT
DISTRIBUTED BY GERSHON ELBER) THE PROGRAMS, EVEN IF YOU HAVE BEEN
ADVISED OF THE POSSIBILITY OF SUCH DAMAGES, OR FOR ANY CLAIM BY ANY
OTHER PARTY.
IRIT is a freeware geometric solid modeler. It is not public domain
since we hold copyrights on it. However, unless you are to sell or
attempt to make money from any part of this code and/or any result
you got with this environment, you are free to make anything you
want with it. In order to use IRIT commercially, you must license
it first - contact us in such a case.
More on the foundations of the IRIT multivariate solver can be found in the following publications:
You can find more on IRIT geometric modeling
environment, in which the multivariate solver is developed, in
here. Contact us
at 